Published on 2017-07-20 in
Xilinx
State The Problem
This is a bug I found in many versions of Xilinx Vivado package and I actually now struggling with it in 2017.2 version. I don’t check out newer versions so it maybe already been solved, idk! Anyway, in my version on the Linux platform, if you open the SDK normally and then for whatever reason kill the machine or the program you cannot open the SDK again whatsoever. As I said I’m running Vivado on Arch Linux 2016.10 version so again this maybe not happen on Windows hosts.
Solution
There may be a lot of workaround for this, but this works for me more or less.
- Go to your Vivado project folder and enter your SDK sub folder.
- Trun on hidden visibility so you can see the dot files.
- Go to following path
<Vivado Project>/<proj name>.sdk/.metadata/.plugins/org.eclipse.core.resources
- Find a file with extention .snap and kill that bastard!!!
- Try to lunch SDK again and the problem should be gone.
Published on 2017-06-26 in
Electrical Engineering
Lately DDR3 is becoming more prevalent in new custom designs however I find that there isn’t much comprehensive document available for newcomers to the DDR franchise. Here I wrote down my own bootstrap on learning DDR3 jargons and way up to design and understand underline rationale behind the DDR3 length matching.
Why DDR
The first question you might ask is why to use DDR. All signals we send on wire or through air are occuping some bandwidth. On spectrum side, the signal bandwidth are so invaluable but what about on the PCBs. Is it important? Yes. The higher the bandwidth, the more delicate design is required and a higher loss would be observed on the signal path. This means that the higher frequencies portion would be attenuated more and to compensate that you need some sort of equlizer circuits like analog DFEs and … . But why bother to send higher bandwidth signals? In short, to acheive more data rate. So heres the thing. In these cases, DDR is used to maintain the bandwidth and at the same time doubles the data rate! How? You know…, by send and receive signal in both clock edges. and you know the rest.
DDR1, 2 and 3 Whats the difference
After that lets talk about the analogy between each ddr generation. In each leap in ddr generation the bus frequency would become higher and Vcc will be lower but except from these, the main improvement in each new version of DDR is incremental increases in prefetch bit size. Before I explain this more, you should know that apart from memory data rate, the internal clk frequency of DDR chip is not more than of 200MHz. So how a 200MHz memory could transfer data at rate of up to 102.4 Gb/s . The answer is by using as many as pins as possible, and using a serialising/deserialising technique.
DDR1 had prefetch size of 2 bit so the IO rate is doubled of internal rate by multiplexing 2 bit and send it in higher frequency on a single line. DDR2 has prefetch size of 4 bit and DDR3, 8 bit. Thats how DDR memories maintain their internal clk while acheiveing higher troughput in each new generation.
DDR Pins
Back to the main topic, lets introduce signaling of DDR chips. I assume a DDR3 chip here but you should able to generalize it to other DDR generation as well. At the top level, The DDR signals are divided into two categories, Data and nonData(CNTL/CLK/Address). The first thing is although it may not seem like it but these two categories have no relation with each other. Data category or DQ for short (Q used becuase of the same reason it used in Flip-Flop) have it’s own clock, DQS (Data strobe), while CNTL/CLK/Address are syncronized with other signal which is CLK. Therefore for routing (layout phase) on PCB each category should length match to ONLY it’s own members.
Behind The Scene
If you are not intrested in knowing how this is possible, please move on. So how Data send and recieved without syncronizing with addresses and control signals? The answer is they are synced at inside of the chip. DDR used a DLL (Delay Locked Loop) which add digital delay to signal to sync data and other signal from inside controller point of view. This pull out the pressure of matching all signal flight times and allow more degree of freedom and ease of use for DDR routing at the board level. The delay value will determined during Memory Training phase. This process is run after power up sequence and calibrate the delay of data group to the clk. The only requirment here is to have CLK be delayed longer than the longest DQS pair.
Byte Lane
Lukily data signals also breaks down into smaller group and each group has it’s own data strobe (CLK). With each byte lane have an independent clk, the contraint for length mathing diminish once more and only length matching inside a byte lane is required.
Data Group: DQ, DQS
Address/CMD Group: Address, RAS ,CAS ,MWE
Control Group: CS, CKE, ODT
Clock Group: CLK
Final Note
Following checklist should be served as a good epilogue for this post:
- Transmission Line Impedance should be 40Ohm with 10 percent tolerance
- CLK trace should be longer than the longest DQS path
- DQ signal are allowed to swap inside of a byte lane
- Cross talk is an important issues in DDR3 SI. micron have a good constraint about how much signals can be tightening together.
- For ZYNQ-7000 10ps is the length mathing margin. It translate to 10mils on a FR4 substrate.
Useful Links
StackExchange – Rams and DQ lines
GitHub – Understanding DDR Memory Training
Xilinx – DQS to CK maximum on Zynq PS DDR Controller
Is it good practice to length match all traces of DDR3
Published on 2017-05-27 in
Linux
One of the great feature of XInput is “Mouse Wheel Emulation” that I graceful with it for more than 5 years. Lately I notice it relieve my hand If I could trig wheel emulation by a key on keyboard instead of a mouse button.
Unfortunately up to this time Evdev not support that and pushing a mouse button through a synthetic way (like using bash script or liunx API) won’t trick EvDev. The reason behind this is that Evdev Wheel Emulation is a device specific driver. you won’t be able to enable it on all devices so it only executed if a button is pressed only on the specific device that you enable emulation on . Moreover after the triggering, wheel emulation only apply to movement of this specific devices with trigger. The figure below show two scenario that lead to unsuccessful wheel emulation.
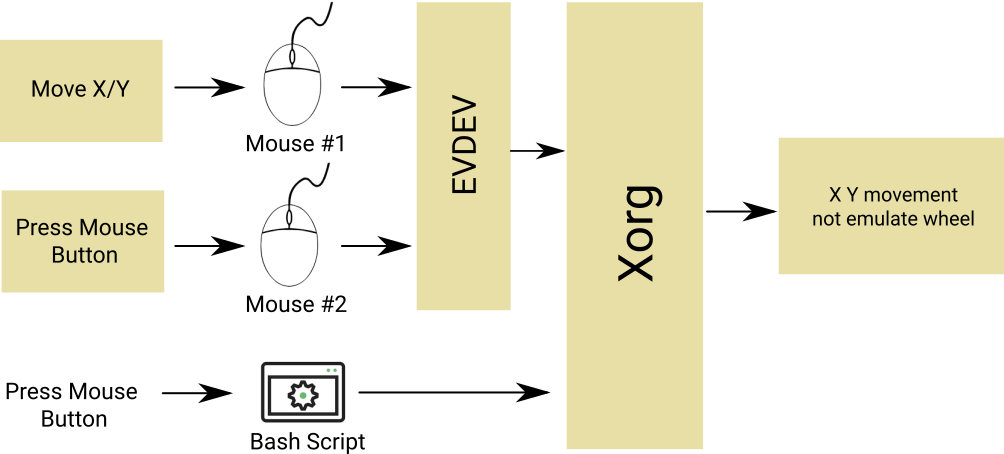
In a nutshell if you press mouse button source from a bash script emulation not work because EvDev driver won’t get it at all thus the button press have to come from a event-based device and not a complete virtual software. Additionally the movement and button press should come from same device. So as shown in the image, movement on Mouse #1 won’t do the emulation triggered from Mouse #2. To recap:
- The button press should come from an event-based device
- Trigger and movement should be on same device
Solution: Uinput-Mapper
Uinput is a kernel module to create event-based device. Uinput-Mapper is a wrapper around uinput in python that can create duplicate from a physical device and then manipulate it. Unfortunately python and Uinput-Mapper are slow and that can cause unexpected lag on mouse movement so the idea in here is to only use Uinput-Mapper under necessary cicumstances.
Uinput-Mapper can be cloned from this github repositories. If you get a glimpse of uinput-mapper, you notice two files input-read and input-create. input-read is a python script that read all event from a event-based device and spit all events out in form of pickle to stdout. For those who like me that don’t know what pickle is, pickle is a saving format. It can save and restore any type of variable so with power of pickle you can save a complex class and restor all variables and function in the state that it had been saved before.
Now what is input-create? input-create is twin of input-read that first create a event-base device and then get all event from stdin in form of pickle and then execut the events on a virtual device that has been just created by the script. To summerize input-read capture all events from an actual device and convert it to pickle, and then input create duplicate device and execute captured events coming from input-read.
So you had to pipeline all output of input read to input-create with something like command shown below
$ ./input-read -D /dev/input/event3 | ./input-create
The -D option in above command imply that input-read output is in format of pickle(not in a human readable format).
Keycode Based Shortcut Trigger
Now the time hase come to manipulate uinput-mapper to our requiment. I think posting all codes in here will clutter the post structure so I explain basic of modification applied on uinput-mapper and leave all codes to my github Bijoux repository.
First we need a script to trigger on pressing a key on keyboard. For sake of simplicity and because of my extra experience with bash I use bash over python to do the key detection and then used stdio to pass it to input-read. The big picture here is first using input-mapper we create a duplicate of our physical mouse. How? by running exact command mentioned above. Then we disable the physical mouse in XInput by running
$ xinput disable $MOUSE_ID
Now instead of data passing directly to EvDev, it pipelined through synthetic event-base device and then pass to EvDev. Here the trick is to write a script (we call it shortcut from now on) to detect a shortcut and then when a shortcut is detected we inject a synthetic event into virtual mouse that we have been created previously. Now from EvDev perspective, this won’t be any different from the event Physical Mouse #1 generate so it trigger the emulation wheel and moving in x/y direction actually scroll the screen on the active window. The figure below demostrate the forgoing concept.
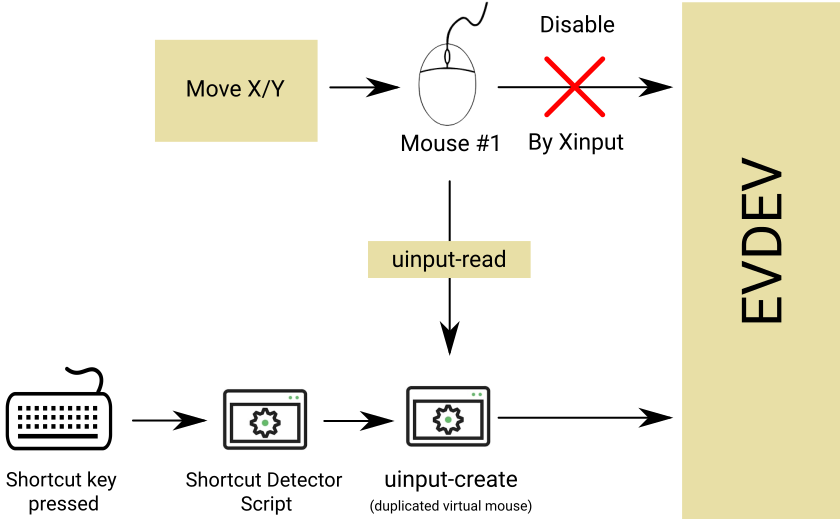
shortcut script detect a key press -> send a notification to input-read -> input-read load a previously recorded button press -> send recorded event to uinput-create -> uinput-create execute synthethic event as the same as other event come from mouse #1 -> …
Performance Issue
As remark previously, python scripts are slow intrinsically passing all mouse events through it cannot be accepted from performance point of view. Furthuremore in my brief test script runtime speed create not dramatic but noticable lag on mouse movement. To solve this issue bridge solution described above should only applied if and only if the wheel emulation should excute on that time. To do that following vivid shortcut (script) clears how this can be done.
The script is nothing more than a program than switch between physical mouse and virtual mouse on the fly. This is accomplished by using enable/disable function of XInput
#!/bin/bash
MOUSE_ID=($(xinput list | grep -m 1 MOUSE_MODEL | awk -F "=" '{print $2}' | awk -F " " '{print $1}'))
VIRTUAL_ID=14
while read -r line
do
#echo $line
if [ "$line" == "key press 108" ];then
echo 1 #inform input-read
xinput disable $MOUSE_ID
xinput enable $VIRTUAL_ID
while read -r line
do
if [ "$line" == "key release 108" ];then
echo 0 #inform input-read
xinput enable $MOUSE_ID
xinput disable $VIRTUAL_ID
break
else
break
fi
done < <(xinput test 12)
fi
done < <(xinput test 12)
Published on 2017-03-03 in
Linux
To deploy qt application or harder QML app you need a tool called windeployqt availible in C:\Qt\Qt5.7.0\5.7\mingw53_32\bin or something like that. To get start open a cmd there and add QtBin path to your enviroment PATH variable.
$set PATH=%PATH%;C:\Qt\Qt5.7.0\5.7\mingw53_32\bin
run following
$windeployqt --qmldir I:\Home\Projects\AllegroAss\UI I:\Home\Projects\AllegroAss\Sources I:\Home\Projects\AllegroAss\Sources\release
Add some icon, spice (winpthread libgcc_s_dw2-1 and libstdc++-6) and you are done.
Published on 2017-02-03 in
Linux
First of all Microchip BM71 is the shittiest module I have ever seen in my life. The antenna gain is poor. Documentation is so bad that simple things are missing and maximum throughput is limited to 3KB/s with 10ms as minimum connection interval. You can find how I calculate the throughput by checking on this article about BLE specification. Here I assume you had the module. Already tried to communicate with it through UART and you failed to get any response back and now you are wondering why the module won’t reply.
The answer is quite simple, because the module is in the Transparent Mode. Transparent Mode is a state which all UART data sent to the module will simply sent out on bluetooth and no matter what you send in, the module wont respond you back. This state is sufficient if you want to send/receive data for simple tasks. But as soon as you need to change Device Name, TX Power or anything else you are stuck.
To get around this, In the Microchip way you have no way but to buy BM71 PICtail evaluation board. Although this should be simple and straightforward I don’t like how it sound. I mean ّI hate this marketing method that “Buy our evaluation board or you can’t use the module”. So here is a workaround to overcome this problem without access to PICtail.
Program BM71 Without PICtail EVM
My module is BM71BLES1FC2-0002AA which according to datasheet must use the PC tools ending with 0002AA. BM71 Module use IS1871 chip inside. It is a little confusing but inside IS1871 page there exist a Firmware & Software Tools v1.06 (matched to my model) that have all necessary tools to configure and update BM71 module firmware.
Now here if your customized board have a high performance uController on it you just need to create a shadow CDC device that get all data coming from USB and send it to BM71. So the all fancy PICtail EVM is nothing more than a “usb to serial (UART)” converter. you need a high performance uColntroller as if the conversion speed is not fast enough isupdate Firmware updateTool through error into your face as it did happen to me. In the case you face the same error as me you need to get knowing IS1870 chip better so you can write your own firmware update tool.
IS1871 Memory Map
IS1871 have 256 Kbytes embedded Flash memory that have all firmware and module configuration. The firmware is the software that operate module during normal operation and configuration is a part of firmware that indicate Device Name, TX Power and anything else that specified as a option in the datasheet.
The firmware start from address 0x0000 and end in 0x40000. The configuration start from 0x35000 and end in 0x37000 with 0x2000 as length. The module use a firmware called BLEDK3. To change the setting for module you have to first generate the configuration header and then write the generated file to the mentioned memory address. For header generation there exist a tool with name IS187x_102_BLEDK3_UI v100.123 inside UserInterfaceTool_V100_123 folder of Firmware & Software Tools v1.06 that you downloaded earlier.
If you need more detail on how to do this please feel free to leave a comment below.
Preparing For Writing To BM71
There are 3 steps you need to do before you able to write any data on BM71.
Step 1: Enter EEPROM Mode
There is a special mode that called eeprom mode (or programming mode). The first step is to enter eeprom mode that clearly explained in the manual and BM71 datasheet. in a few words, you need to set a special pin and while holding the pin at specified level, reset the module
Step 2: Connect To Module
After entering eeprom mode, the module stop the LED blinking (if you had one on your board). then you need to send 0x01, 0x05, 0x04, 0x0D, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 I don’t know why this and what data they represent but sending out this will get the state machine to “CONNECTED” state. If the operation is successful you should get something from module (If you need to know the exact response feel free to ask)
Step 3: Erase The Flash
This step seems optional but it’s not. If you don’t send erase command before writing, any attempt to change memory will result in fail writing and memory won’t change. Again I don’t know why is module working this way or if I using it in a wrong way but I can’t write any register if I don’t send Erase command before to do so.
Secondly I don’t know where the erase command does actually erase. On my simple check this command only erase configuration area that I specified before and firmware remained unchanged but I’m not sure if it’s always the case.
To erase flash send 0x02, 0xFF, 0x0F, 0x0E, 0x00, 0x12, 0x01, 0x0A, 0x00, 0x03, 0x00, 0x00, 0x40, 0x03, 0x00, 0x00, 0x20, 0x00, 0x00 any response should indicate the erase operation is successful. I highly recommend to wait 1 second before sending any further command.
I noticed that the flash operation have some inside timeout watch dog. If the writing command execute later than this timeout any write attempt result in failure.
Step ∞: Disconnect
The last step after all read/write operation is disconnection. This option seems to be optional but highly recommended to execute. The disconnect packet is 0x01, 0x06, 0x04, 0x03, 0xFF, 0x0F, 0x00
BM71 Writing
To write a register we start with a base command template then fill it with appropriate value.
Write Template: 0x02, 0xFF, 0x0F, 0x0E, 0x00, 0x11, 0x01, 0x0A, 0x00, 0x03, 0x00, 0x00, 0x46, 0x03,0x00, 0x20, 0x00, 0x00, 0x00
packet_size = data_size + 19;
address = 0x35000;
write_temp[3] = 14 + data_size;//ACL
write_temp[5] = 0x11; //COMMAND=WRITE
write_temp[7] = 10 + data_size;//ISDAP
write_temp[15] = block_size;//LENGTH
memcpy(&write_temp[11],(uint8_t*) &address, sizeof(address));//ADDRESS
memcpy(&write_temp[19],(uint8_t*) (eeprom_table), data_size);//Data
The data_size is in byte. In above example I used data_size=16. On a successful write, BM71 return 0x02, 0xFF, 0x0F, 0x0E, 0x00, 0x10, 0x01, 0x0A, 0x00, 0x03, 0x00, 0x00, 0x46, 0x03,0x00, 0x20, 0x00, 0x00, 0x00 on a failure due to requirement for flash, the second to last 0x00 will changes to 0x01.
Published on 2016-10-12 in
Linux
The power button on my pc case is not very handy to work with, which made waking up by mouse/keyboard an awesome idea. The first thing to achieve this is obviously, getting inside bios and enable the wake up option for keyboard/mouse, LAN or whatever you like. You probably at this step expect that things get to work out of the box.
Well…. probably no. but still you got chance. from my experience some device works out of the box and some simply don’t. why? I think because they are a little too complicated for ACPI to handle them. Here I summarize my workaround to get these kind of devices work.
Step 1: Find device path
First of all you need to find device path. Device path is both the way that the device is connected to your computer and also the way you can access your device settings on your computer. To get this path, all you need is to find your keyboard/mouse node on /dev path and feed it to udevadm. As an example for my keyboard executing something like
udevadm info -q path -n /dev/input/event0
/devices/pci0000:00/0000:00:14.0/usb1/1-5/1-5:1.0/0003:04F2:0833.0001/input/input2/event0
give this path and for mouse executing
udevadm info -q path -n /dev/input/mouse0
/devices/pci0000:00/0000:00:14.0/usb1/1-13/1-13:1.0/0003:1BCF:0002.0003/input/input4/mouse0
Step 2: Find your lucky wakeup file
Next you need to surf on your device path and find a file named wakeup. it may be in your device path/power. if not look it parent directory and foreword until you find the right file. For example in my case, wakeup file turned out to be /sys/devices/pci0000:00/0000:00:14.0/usb1/1-13/power/wakeup. Then you should write enabled inside this file by running
sudo sh -c "echo enabled > '/sys/devices/pci0000:00/0000:00:14.0/usb1/1-13/power/wakeup'"
If you are standing on a right place then probably double clicking cause your pc to wake up after suspension. if not try to looking the parent folder.
Step 3: Make The Process into Auto mode
As you know udev let you run script if specific device connected to the kernel, we exploit the idea and enable wakeup for our little cute mice.
/etc/udev/rules.d/90-keyboardwakeup.rules
-----------------------
SUBSYSTEM=="usb", ATTRS{idVendor}=="1b1c", ATTRS{idProduct}=="1b19" RUN+="/bin/sh -c 'echo enabled > /sys$env{DEVPATH}/../power/wakeup;'"
Hope You Enjoy
Published on 2016-05-05 in
Electrical Engineering
Advanced Design System officially support RHel 5, RHel 6 and Solaris 10. My desktop use ARCH Linux, which is not listed in the support platforms. So some steps have to taken before get ADS to work. Here I summarize my walkaround on installing ADS on Arch Linux platform which it may or may not be possible to applied on any distribution other than Arch.
Installation Steps:
- Install ADS on your PC using SETUP.sh shell script. Keep in mind that Install ADS on a path with no white-space or special character, although ADS setup does not complain, this cause fatal error in ADS runtime.
- From try and error it seems that ADS use Qt 4.8.6 which is have minor changes that make it incompatible with Qt4 provided from arch repository. Fortunately Qt 4.8.6 is packed inside ADS path, so it can be readily used by adding it to LD_LIBRARY_PATH environment variable.
Edit LD_LIBRARY_PATH in <ADS_PATH>/bin/ads
LD_LIBRARY_PATH=$HPEESOF_DIR/lib/linux_x86_64:$HPEESOF_DIR/lib/linux_x86:$HPEESOF_DIR/adsptolemy/lib.linux_x86_64:$HPEESOF_DIR/SystemVue/2014.10/linux_x86_64/bin/MATLABScript/sys/os/glnxa64:$HPEESOF_DIR/adsptolemy/lib.linux_x86:$HPEESOF_DIR/SystemVue/2014.10/linux_x86_64/lib:$LD_LIBRARY_PATH
- Create a duplicate from
libXm.so.3 and rename it to libXm.so.4 in <ADS_PATH>/SystemVue/2014.10/linux_x86_64/bin/MATLABScript/sys/os/glnxa64. This may seems weird, so just to be clear out libXm is for Solaris platform (desktop environment). We create this file just to prevent from linking error which is not cause any further problem as while as the running platform is not Solaris.
- Install Dependencies which is needed by License ManagerADS software.
sudo pacman -S lsb-release libxp
yaourt ld-lsb
yaourt ksh
- Run
<ADS_PATH>/bin/ads
License Setup:
HostName: the computer name can be achieved by running following command
$uname -a
Linux Bijan-PC 4.4.7-1-lts #1 SMP Thu Apr 14 17:26:39 2016 x86_64 GNU/Linux
which is revealed that my HostName is Bijan-PC
There is no MAC Address need for Linux platform on the other hand ADS use so-called CPUID which generate based on your platform which can be used to get license file from KeySight Corporation. CPUID, MAC and HostID are all the same. note that HostID is different from HostName
Published on 2016-04-14 in
ARM,
Linux
You may serach out all sites but there isn’t any adequate context in this subject. ARM family is a new platform that it’s compiler and other toolchains also matured recently so unfortunately there isn’t much quick start guide available out there. Here, I try to fill this gap and give you a hint about how to begin developing your fresh ARM-based board under GNU/Linux. Throughout this tutorial I work out with STM32F4 Discovery development board and Arch Linux distribution. If your board or your distribution is different don’t worry, with a little efforts all steps can be applied into your case.
Required tools:
sudo pacman -S arm-non-eabi-gcc
After installing toolchains you need to download CMSIS library for your microcontroller. CMSIS is a vendor based library, written to interface CPU and peripherals control register in a delicate manner. In our case, ST Microelectronic CMSIS library known as STMCube F4, can be downloaded from STMicroelectronics webpage.
Each stm32 device carry out with a two user manual so-called Programming Manual and Reference Manual. Reference Manual address to each peripheral registers and unit description. On the other hand Programming Manual show how to employ interrupt and hook up booting process. Both these manuals are essential in programming ARM microcontroller so ensure to have them before you start.
Unfortunately for the time being I’m busy to write down full guide on programming Arm Coretex M. so if you are in hurry to get things to work you can checkout our git repository for a clean and simple blink LED project. please keep in mind that follow all above steps and check ReadMe folder in the repository befor jump into the final stage.
Published on 2016-01-26 in
Zest
Hello all, I start this division to share my little secret with others. Kidding. Here is no more than a blog that I wrote about some useful tips on Linux or hardware design. May the guides be useful to you.


