| • Lattices: | Are a graph containing states(nodes) and arcs(edges). which each state represent one 10ms frame |
| • Arcs: | Are start from one state to another state. Each state arcs can be accessed with arc iterator and arcs only retain their next state. each arcs have weight and input and output label. |
| • States: | Are simple decimal number starting from lat.Start(). and goes up to lat.NumStates(). Most of the time start is 0 |
| • Topological Sort: | An FST is topological sorted if the FST can be laid out on a horizontal axis and no arc direction would be from right to left |
| • Note 1: | You can get max state with lat.NumStates() |
| • Note 2: | You can prune lattices by creating dead end path. Dead end path is a path that’s not get end up to the final state. After that fst::connect will trim the FST and get rid of these dead paths |
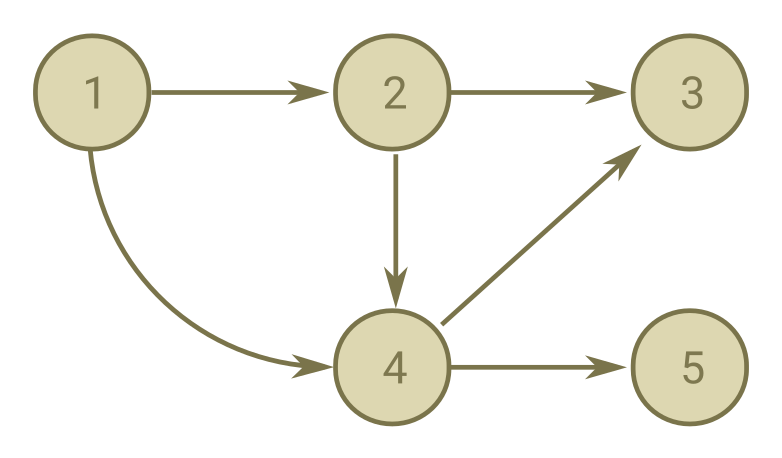
Fig. 1. Topologically Sorted Graph
| • Link: | Same as arc |
| • Token: | Are same as state. They have costs |
| • FrameToks: | A link list that contain all tokens in a single frame |
| • Adaptive Beam: | Used in pruning before creating lattice and through decoding |
| • NEmitting Tokens: | Non Emitting Tokens or NEmitting Tokens are tokens that generate from emitting token in the same frame and have input label = 0 and have acoustic_cost = 0 |
| • Emitting Tokens: | Emitting Tokens are tokens that surpass from a frame to another frame |
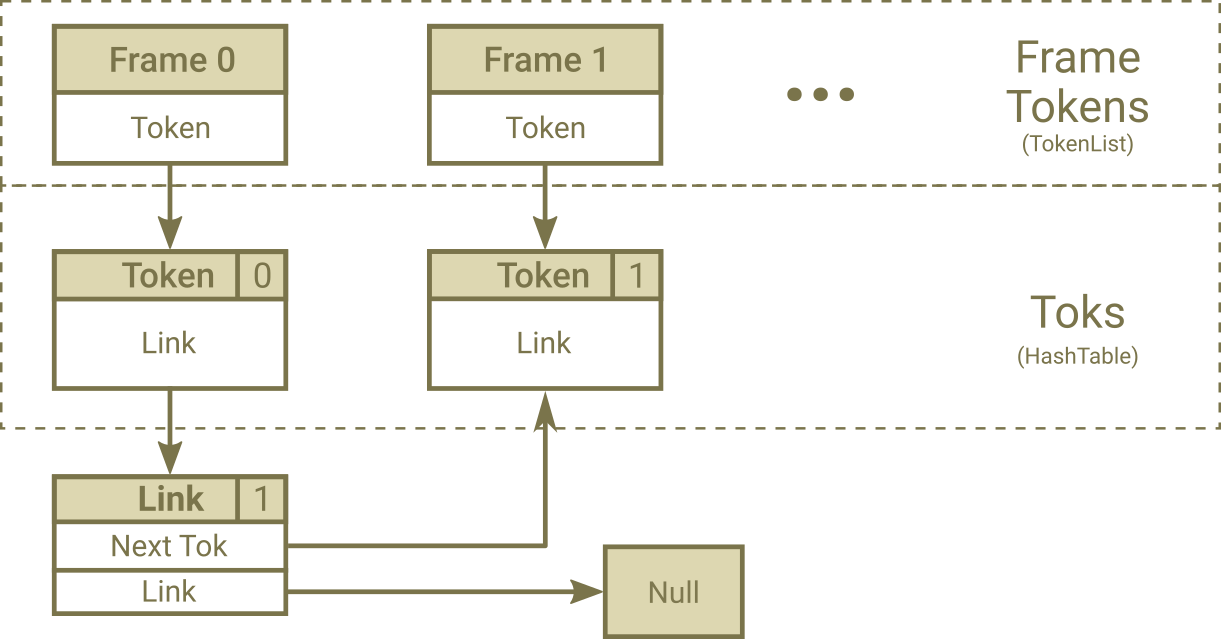
Fig. 1. After First Emitting Nodes Process
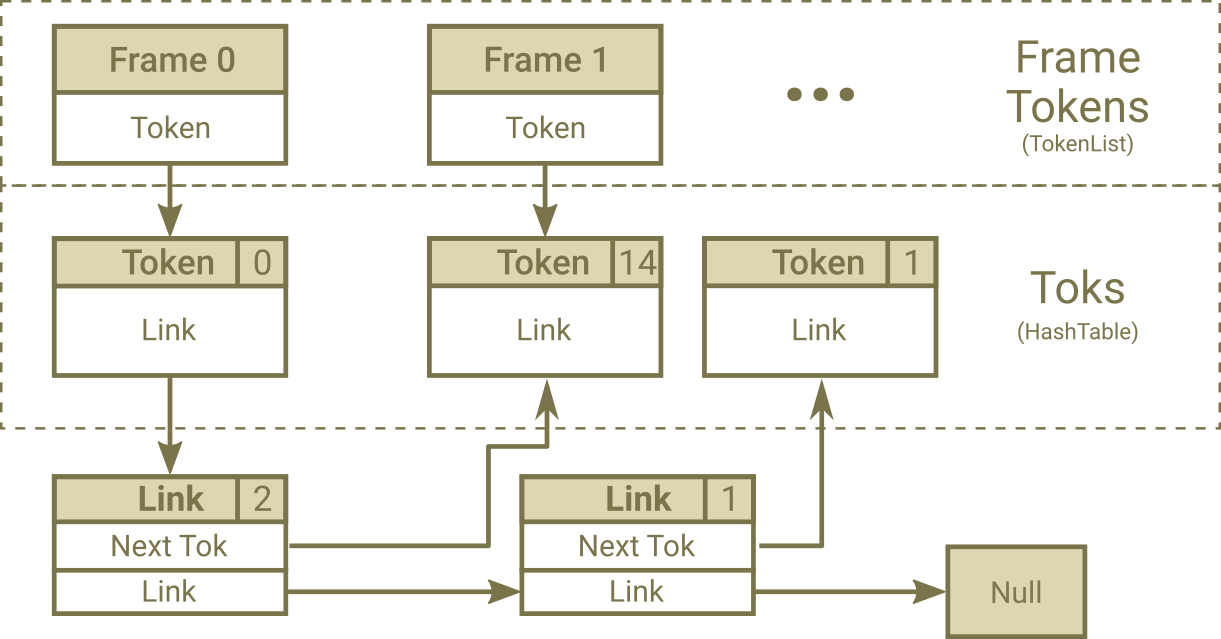
Fig. 2. After Second Emitting Nodes Process
A Simplified Block Diagram of ASR Process in Kaldi
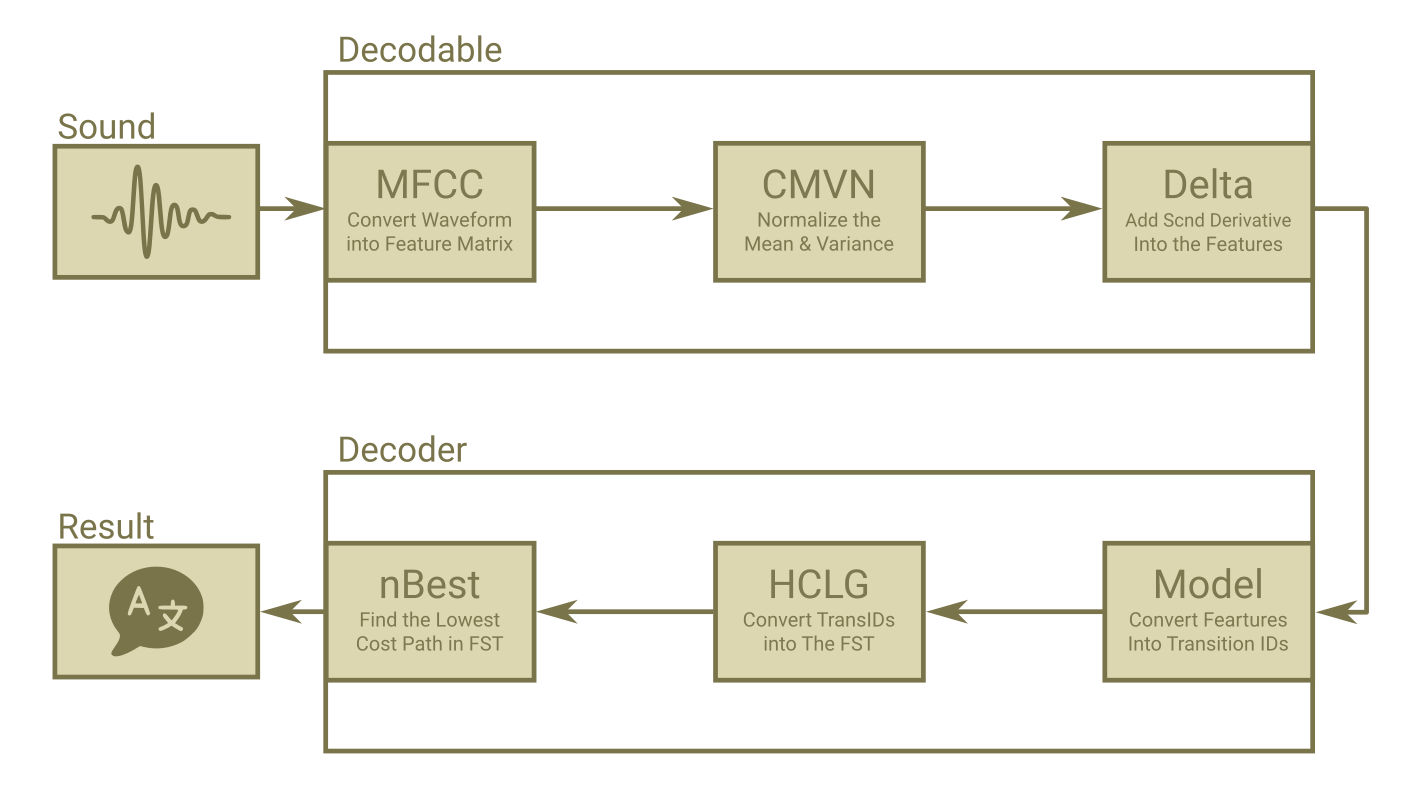
| • Costs: | Are Log Negative Probability, so a higher cost means lower probability. |
| • Frame: | Each 10ms of audio that using MFCC turned into a fixed size vector called a frame. |
| • Beam: | Cutoff would be Best Cost–Beam (Around 10 to 16) |
| • Cutoff: | The maximum cost that all cost higher than this value will not be processed and removed. |
| • Epsilon: | The zero label in FST are called <eps> |
| • Lattices: | Are the same as FSTs, instead each token keeps in a framed based array calledframe_toks. In This way the distance in time between each token will be perceived too. |
| • Rescoring: | A language model scoring system that applied after final state to improve final result by using stronger LM model than n-gram. |
| • HCLG(FST): | The main FST used in the decoding. The iLabel in this FST is TransitionIDs. |
| • Model(MDL): | A model that used to convert sound into acoustic cost and TransitionIDs. |
| • TransitionIDs: | A number that contain information about state and corresponding PDF id. |
| • Emiting States: | States that have pdfs associated with them and emit phoneme. In other word states that have their ilabel is not zero |
| • Bakis Model: | Is a HMM that state transitions proceed from left to right. In a Bakis HMM, no transitions go from a higher-numbered state to a lower-numbered state. |
| • Max Active: | Uses to calculate cutoff to determince maximum number of tokens that will be processed inside emitting process. |
| • Graph Cost: | is a sum of the LM cost, the (weighted) transition probabilities, and any pronunciation cost. |
| • Acoustic Cost: | Cost that is got from the decodable object. |
| • Acoustic Scale: | A floating number that multiply in all Log Likelihood (inside the decodable object). |
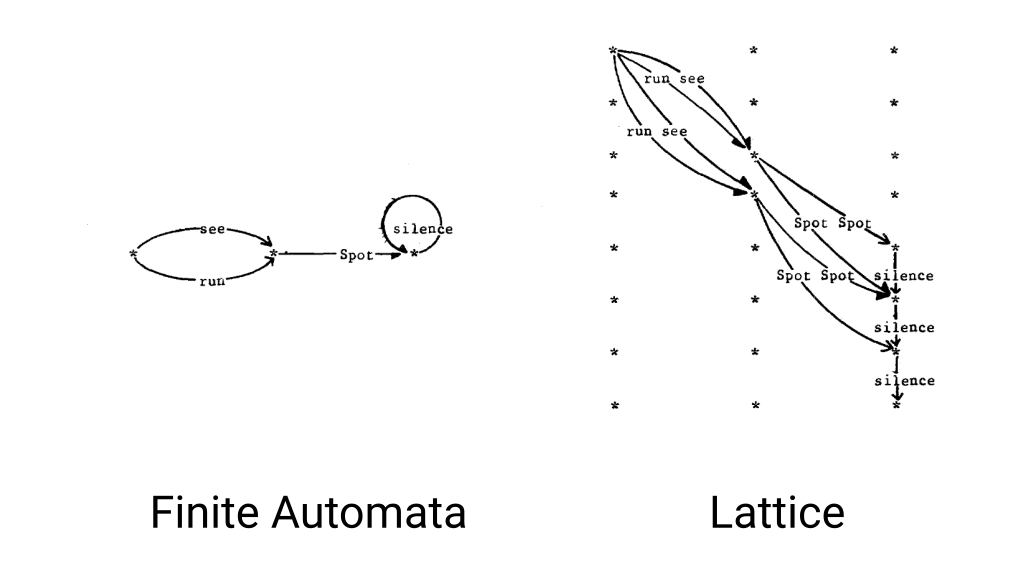 Fig. 1. Demonstration of Finite State Automata vs Lattices, Courtesy of Peter F. Brown
Fig. 1. Demonstration of Finite State Automata vs Lattices, Courtesy of Peter F. Brown
The command below generates a tone signal out of the speaker and receives it back through the mic. Measuring the phase diff will reveal the round-trip latency.
alsa_delay hw:1,0 hw:0,0 44100 256 2 1 1
Here hw:1,0 refer to the recording device that can be retrieved from arecord -l and hw:0,0 refer to the playback device. Again can be retrieved from aplay -l .
The 44100 is the sampling rate. 256 is the buffer size. 256 works best for me. Lower numbers corrupt the test and higher numbers just bring more latency to the table. Don’t know exactly what nfrags input and output arguments are but 2 1 and 1 respectively works magically for me. I just tinkering around and found these numbers. No other number works for me.
1. Focusrite Scarlett Solo Latency: 2.5ms
2. Shure SM57 Mic Latency: 2.5ms
3. OverAll Delay: 14ms with non-RT mode
You can tinker around the effect of latency with
pactl load-module module-loopback latency_msec=15
To end the loopback mode
pactl unload-module module-loopback
As Always Useful links
Arun Raghavan – Beamforming in PulseAudio
Arch Linux Wiki – Professional Audio, Realtime kernel
Let’s Enhance Kaldi, Here are some links along the way. Look like YouTube is progressing a lot during the last couple of years so basically here is just a bunch of random videos creating my favorite playlist to learn all the cool stuff under the Kaldi’s hood.
LattceFasterDecoderLattices: A more complex form of FST‘s, The first version decoders were based on FST’s (like faster-decoder and online decoders). For Minimum Bayesian Risk Calculation Using Lattices will give you a better paved wayfaster-decoder: Old decoder, very simple to understand how decoding process is donelattice-faster-decoder: general decoder, same as faster-decoder but output lattices instead of FSTsDecodableInterface: An interface that connects decoder to the features. decoder uses this Decodable object to pull CMVN features from it.BestPath: An FST that constructed from the Best Path (path with maximum likelihood) in the decoded FST.nBestPath: An FST constructed from the top N Best Path in the decoded FST.GetLinearSymbolSequence: The final step in the recognition process, get a BestPath FST or Lattice and output the recognized words with the path weight. CompactLattices need to be converted using ConvertLatticeStrongly Connected Component: A set that all components are accessible (in two ways) by it’s member.ProcessEmitting that pulls loglikelihood from the decodable objectThanks to this marvelous framework, a trained model is at disposal with WER of absolute zero percent over the 10 minutes of continuous speech file. The final piece to this puzzle would be implementing a semi-online decoding tool using GStreamer. As always useful links for further inspection
gst_caps_to_string(caps)On the way to develop a driver for Scarlet Solo Gen3 to harness the power of Shure SM57 Dynamic Microphone.
Useful links to preserve:
Microsoft – Universal Audio Architecture: Guideline to for Sound Card Without Propriety Driver
Update 1: Finished developing! Here is the link to the released driver
GitHub – BijanBina/BAudio Windows 7 x64
Here I am, pursuing once more the old-fashioned machine learning. I’ll keep it short and write down useful links
The combination of FMCOMMS3 and PetaLinux is working only on Ubuntu 16.04 LTS, PetaLinux 2018.3, Vivado 2018.3
sudo apt-get install -y gcc git make net-tools libncurses5-dev tftpd zlib1g-dev libssl-dev flex bison libselinux1 gnupg wget diffstat chrpath socat xterm autoconf libtool tar unzip texinfo zlib1g-dev gcc-multilib build-essential libsdl1.2-dev libglib2.0-dev zlib1g:i386 screen pax gzip
Create a new directory
sudo mkdir -m 755 PetaLinux sudo chown bijan ./PetaLinux
Install PetaLinux by running the following command.
./petalinux-v2018.3-final-installer.run .
Clone Analog Devices HDL repository
git clone https://github.com/analogdevicesinc/hdl.git
git clone https://github.com/analogdevicesinc/meta-adi.git
Make HDL Project
export PATH="$PATH:/mnt/hdd1/Vivado/Vivado/2018.3/bin" make fmcomms2.zc702
source ../settings.sh petalinux-create --type project --template zynq --name fmcomms3_linux
Then change directory to the created project directory.
petalinux-config --get-hw-description=<hdf file directory>
set Subsystem AUTO Hardware Settings -> Advanced bootable
images storage setting -> u-boot env partition settings -> image
storage media -> primary sd
/home/bijan/Projects/ADI_Linux/meta-adi/meta-adi-core /home/bijan/Projects/ADI_Linux/meta-adi/meta-adi-xilinx
Download following files and write it down to meta-adi/meta-adi-xilinx/recipes-bsp/device-tree/files
pl-delete-nodes-zynq-zc702-adv7511-ad9361-fmcomms2-3.dtsi
zynq-zc702-adv7511-ad9361-fmcomms2-3.dts
To build petalinux run following command inside petalinux directory
petalinux-build
In case of error remove -e from first line of system-user.dtsi file inside build/tmp/work/plnx_zynq7-xilinx-linux-gnueabi/device-tree/xilinx+gitAUTOINC+b7466bbeee-r0/system-user.dtsi
Install Digilent Drivers
<Vivado Install Dir>/data/xicom/cable_drivers/lin64/install_script/install_drivers/install_drivers
To program the board using jtag interface. First we should package the kernel with the following command.
petalinux-package --boot --fsbl images/linux/zynq_fsbl.elf --fpga images/linux/system.bit --u-boot --force
Then login to the root account and run following commands.
petalinux-package --prebuilt --fpga images/linux/system.bit --force petalinux-boot --jtag --prebuilt 3 -v petalinux-boot --jtag --fpga --bitstream images/linux/system.bit
Enable SW16.3 & SW16.4 on ZC702 Board.
Generate BOOT.BIN file by executing following command:
petalinux-package --boot --fsbl images/linux/zynq_fsbl.elf --fpga images/linux/system.bit --u-boot --force
copy image.ub and BOOT.BIN to SD-Card
To change username and password open
meta-adi/meta-adi-xilinx/recipes-core/images/petalinux-user-image.bbappend
Change analog to your desired password. If you want to remove login requirement comment EXTRA_USERS_PARAMS and enable debug-tweak in petalinux-config -c rootfs.
To change UART baudrate run
petalinux-config
go to Subsystem AUTO Hardware Settings -> Serial Settings -> System stdin/stdout baudrate
Useful Links
Analog Wiki – Building with Petalinux

